Recientemente nos han escrito de Venezuela y Ecuador pidiendo consejo para ajustes en la configuracion Linux y Mach3 y las bases las tengo escritas en algunas publicaciones previas.
Algo muy común es que a veces queremos controlar motores de pasos Unipolares en EMC Linux y es complicado si no se conoce un poco del funcionamiento del programa y EMC Linux no tiene soporte para CNC que ellos llaman Juguetes (CNC toy) sin embargo si se puede y tambien poder darle mas poder a esos motores.
Algo también muy comun es querer mover los motores con tornillos Standard o tornillos de rosca fina (milimetricos) y al hacer esto reducimos la velocidad de movimiento del motor ya que necesitamos de mas pulsos para moverlos; es decir:
si utilizo un motor de 200 pasos/r entonces para moverlo 25.4mm = 1 pulgada el motor tiene que girar 7 veces si uso un tornillo acme x 200 =1400
Si uso un tornillo Standar entonces es 200 x 13 = 2600
Si uso milimetrico 200 x 25.4 =5080
Ahora si utilizo un motor de 1000 pasos/r
Acme 7 x 1000 = 7000
Standard 13 x 1000 = 13000
MM 25.4 x 1000 = 25400
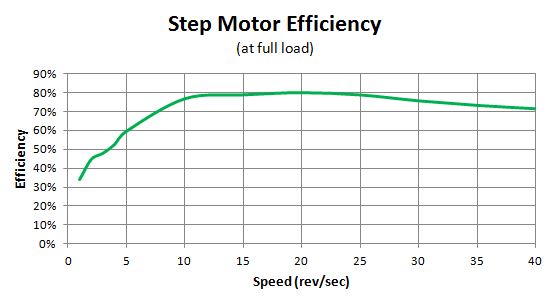
Entonces tenemos demasiados pulsos para muy poco avence, entonces pretendemos subir la velocidad de los pulsos y…. Tadaaa!!! el motor se frena, se bricotea, solo zumba, pierde fuerza y esto es debido a 2 cosas:
la velocidad de respuesta del motor es excedida y la otra la velocidad de respuesta del controlador y la PC.
Continua…