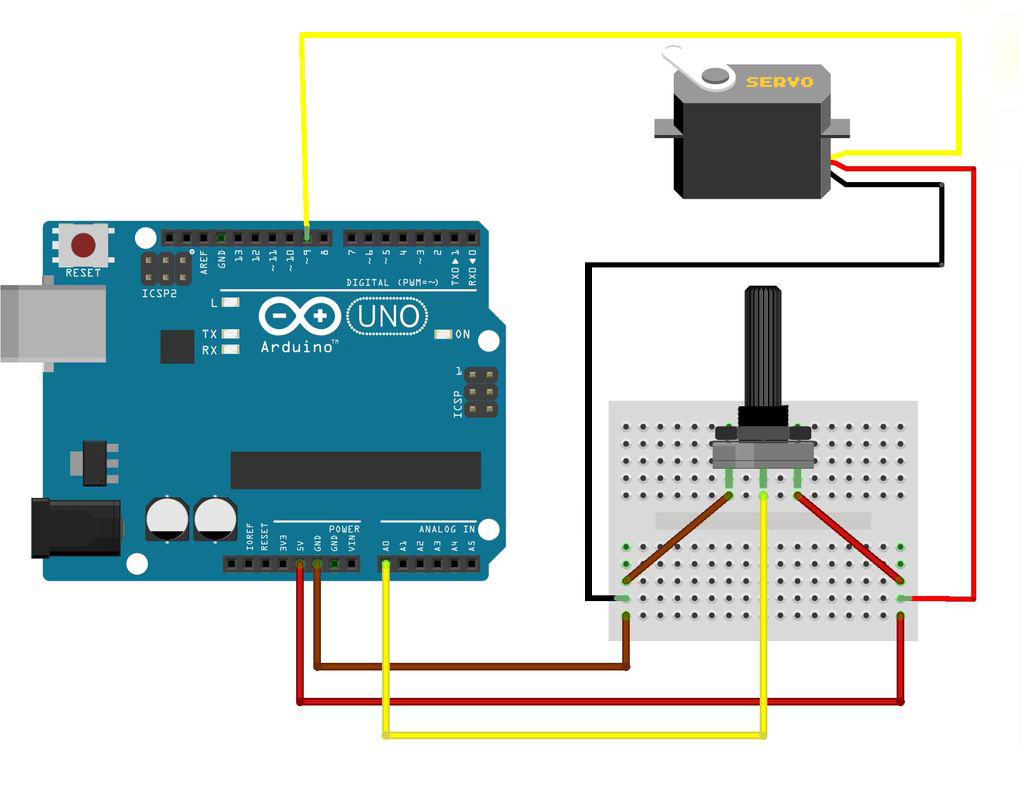
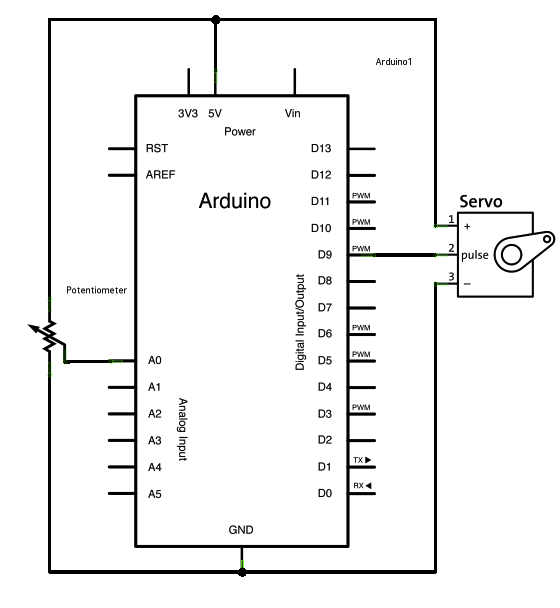
Como estamos el la categoría de Arduinos, usaremos el Arduino Uno o el Arduino Nano para controlar la posicion de un servo por medio de un potenciometro, el consepto es muy básico y sencillo de hacer y con este principio podremos controlar varios para usarlos en algún brazo robotico.
#include <Servo.h>
Servo myservo; // Crea un objeto mara control servo
int potpin = 0; // pin analogo de entrada mediante el potenciometro (A0)
int val; // variable que lee en pin analogo
void setup() {
myservo.attach(9); // Agrega la salida PWM al pin digital 9
}
void loop() {
val = analogRead(potpin); //lee el valor del potenciometro (valor entre 0 and 1023)
val = map(val, 0, 1023, 0, 180); // Mapea el valor del pin analogo (valor entre 0 and 180)
myservo.write(val); // Ajusta la posicion del servo de acuerdo al valor 0 ->180 grados
delay(15); // tiempo de espera entre 10 y 100 para que sea en tiempo real el movimiento
}